These issues were recently addressed by Julian Lee MRAeS from test flying, capability management, safety and regulatory specialists, Nova Systems at a presentation at RAeS HQ on 9 May (and also at an earlier talk on 12 February at the RAeS Oxford Branch).
Lee began by outlining the advances in composite construction, electric motor, battery and control and navigation system technology which have enabled the development of eVTOLS which can either be piloted or automated to operate as autonomous passenger-carrying drones.
The market for urban air mobility is expected to be big business and many companies have become interested in its potential, including mainstream manufacturers such as Boeing, Airbus, Embraer and Bell, plus a large number of start-up companies. Lee explained how multinational transportation ridesharing service company Uber Technologies, which has already shaken up traditional concepts of ground transportation, is keen to encourage manufacturers to develop electric flying vehicle designs which would enable the company to spark a revolution in urban air transport. To this end, Uber has created the annual UberElevate conference to bring together eVTOL designers, operators and regulators to discuss how the flying taxi vision can be realised. The 3rd UberElevate conference is due to meet later this year in Washington and will include speakers from technology researchers, manufacturers, airlines, air traffic control providers, civic authorities and financiers.
Lee estimated that there are currently around 130 urban air transport projects in development, many of which are funded by Californian Silicon Valley billionaires. “There is currently a race to see who will get a design developed and certificated,” he remarked. However, Lee also predicted that only around 10% of these projects was likely to achieve commercial success, saying: “The first ones to develop and mass produce flying taxis will be the ones who achieve market dominance.”
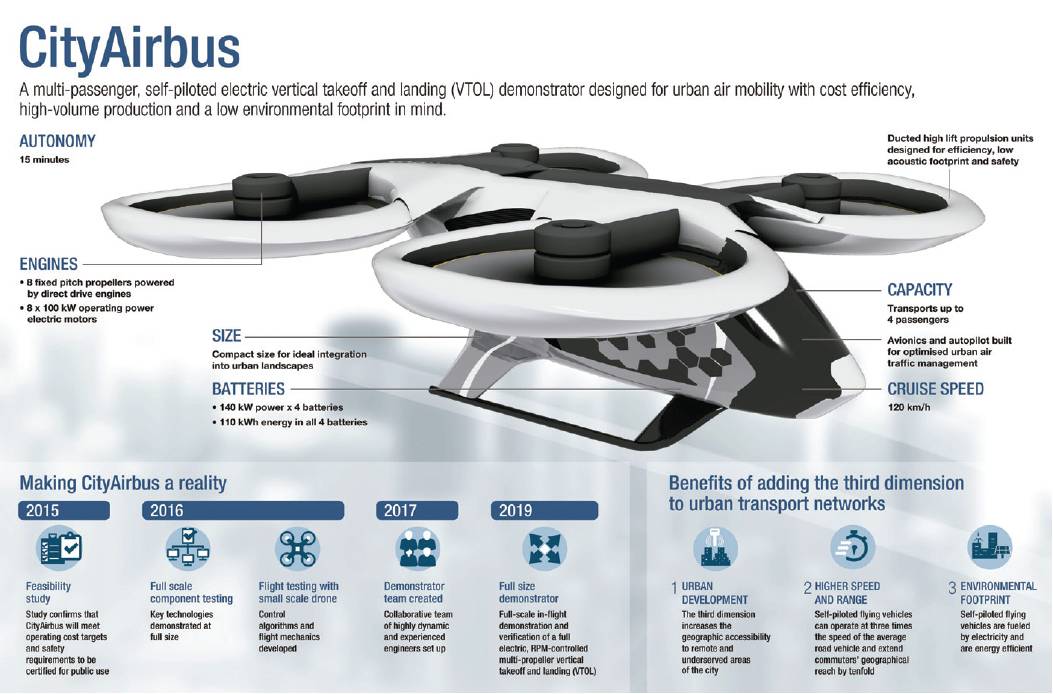 CityAirbus VTOL
flying taxi design concept. Airbus
CityAirbus VTOL
flying taxi design concept. Airbus
Operational challenges
In order to maximise safety and build public confidence, the initial generation of flying taxis are expected to be piloted. Once the concept is accepted and proven to be safe, then autonomous vehicles, which will effectively be large UAVs with passengers, will follow. These flying vehicles will fly along narrow airspace corridors between dedicated landing pads at air taxi ports located at airports, railway stations, open areas or on top of tall buildings. These ports will act as hubs for air taxi routes and will include facilities for arriving and departing passengers, as well as recharging, storage and maintenance services for the air taxis. Not long after the lecture on 23 May, plans were announced by vertiport specialists, Skyports and eVTOL manufacturer Volocopter, to build the first eVTOL landing pad in Singapore.
However, before this vision is realised, there are a number of challenges yet to be overcome. “This concept will only work if the aircraft are as reliable as an Uber car or a black cab,” cautioned Julian Lee. “Otherwise, you’ll return to the old adage ‘Time to spare, go by air’.
Because the eVTOL taxis will operate in cities, the vehicles will have to fly much lower and closer to buildings than aircraft (and drones) are currently permitted. “These vehicles are going to have to operate in an extremely challenging environment,” warned Lee. “Using them in California where it’s sunny and there’s plenty of space seems realistic but I’m not sure the designers have thought about what it might be like in London in February when it’s freezing and it’s foggy.”
Hazardous environment
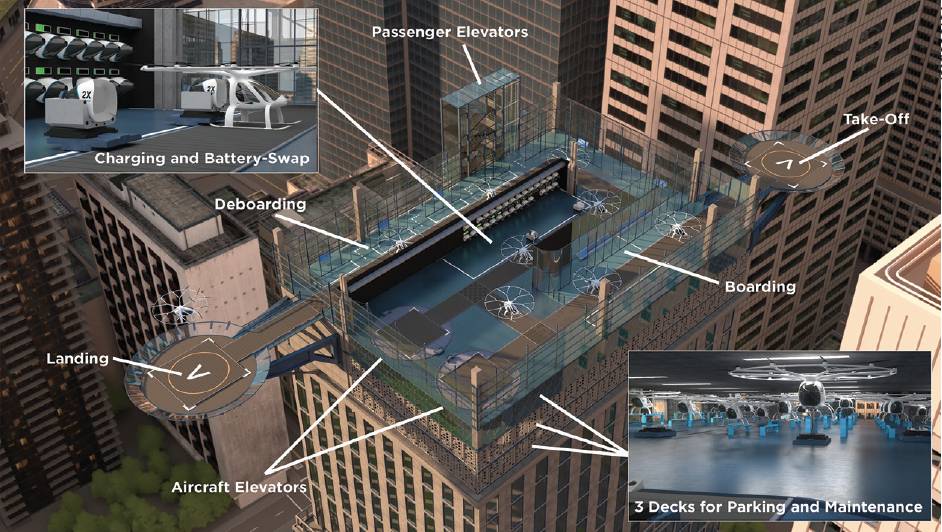 An air taxi high-rise
hub, as envisioned by
German eVTOL designers
VoloCopter. Air taxis are
expected to have to fly
much lower and closer to
buildings than conventional
aircraft or UAVs. Volocopter
An air taxi high-rise
hub, as envisioned by
German eVTOL designers
VoloCopter. Air taxis are
expected to have to fly
much lower and closer to
buildings than conventional
aircraft or UAVs. Volocopter
Lee explained how, even though air taxis will be flying along narrow airways, there will be risks due to higher speeds,” he said. “These are high-performance vehicles capable of speeds of up 150mph. If they fly down a street surrounded by high-rise buildings, you’ve got congested airspace with potential closing speeds of 300mph, If you’re flying near buildings, you’ve also got potentially high levels of air turbulence (for example, in the lee of the Shard) – as any helicopter pilots who have flown near mountains can tell you. Not only that but the eVTOLs will be flying through highly congested terrain which changes quickly as new infrastructure is added, such as masts, wires, scaffolding and cranes, etc. Although the vehicles will be fitted with precision navigation systems, what happens if the inertial navigation system fails or if you have GPS jamming?”
Degraded vision environment
Another factor to be considered is that the air taxis will not always have clear weather and good visibility but will have to operate in degraded vision environment (DVE) conditions, such as at night, in mist, fog, drizzle, rain, snow and freezing conditions. However, Lee reminded his audience that the challenge of operating aircraft in bad visibility has been around ever since aircraft started to fly. The issue of DVE is a familiar one to helicopter pilots who have to fly or land both day and night in rain, fog, storms, snow or even sandstorms – a problem which was highlighted in recent military operations in Iraq where it was very dusty and also when pilots were trying to land at night in low ambient light levels.
 Airbus
Airbus Jullian Lee MRAeS, Nova Systems (Nova Systems)
Jullian Lee MRAeS, Nova Systems (Nova Systems)

