DEFENCE ASW Unmanned air vehicles
UAVs vs Subs
Ahead of an imminent deployment of General Atomics’ MQ-9B SeaGuardian UAV demonstrator to the UK to take part in NATO operation capability maritime trials, JAMIE SAYER, RAeS Council Member looks how UAVs are expanding their surveillance capabilities to hunt sub-surface threats.
 General Atomics has now tested its MQ-9 platform with sonobouy pods. General Atomics ASI
General Atomics has now tested its MQ-9 platform with sonobouy pods. General Atomics ASI
Many years ago, as a junior officer under training, I was stood on the bridge wing of HMS Birmingham off the Isles of Scotland, with the mighty responsibility of signalling the commencement of a sizeable AntiSubmarine Warfare (ASW) exercise. This involved the dropping of Marine Sound Signals (MSS) into the ‘oggin’. A simple enough task you might think. Mesmerised by the amount of expensive naval hardware on display, including the poised ASW dipping helicopters of 820 Naval Air Squadron, I somehow lost count.
To this day I believe I dropped four but it is rather unfortunate that five bursting MSSs signals an emergency which required all submarine assets on the exercise to surface. I watched captivated as the submarine hunters suddenly, instead of spending hours as a semi-blind cat in a hunt versus an extremely stealthy and deadly mouse, pounced on surfacing submarines – they clearly couldn’t believe their luck! Fortunately for me, those that were responsible for listening to all noises sub-surface could not agree on how many MSS they had heard – some heard fewer than four, some heard a lot more!
The ASW battlespace today
Twenty-five years on, the sea battle is suddenly a great deal more complicated and profoundly radical with sophisticated unmanned underwater vehicles (UUV), unmanned surface vehicles (USV) and unmanned air vehicles (UAVs) joining the brawl in collaborating swarms, some with embedded artificial intelligence (AI), operating as surveillance, stooges/decoys, surface/sub-surface threats and strike assets. ASW doctrine is having to be rapidly revised to take account of these numerous advances in the battlespace. Modern underwater threats can strike from longer ranges and broader situational awareness is needed. The problem of sanitising areas of the sea has become a wicked one. Launching helicopters for ASW missions is expensive; the operation costs are high, combining fuel, manpower and maintenance and the helicopter may have other competing missions.
Navies are therefore turning towards machines that can do the dirty job of spending hours loitering, surveying and listening for unusual activity and threats. This article examines some of the potential ‘newbies’ into this space which might offer the opportunity to give the ‘cat’ perfect vision.
 A Skeldar V-200 rotary wing UAV. UMS Skeldar
A Skeldar V-200 rotary wing UAV. UMS Skeldar
Attacking unmanned
Using unmanned systems for submarine attack is not new. In the period from the late 1950s to the mid-1960s, the US Navy employed the Gyrodyne QH-50 DASH, which carried a homing torpedo or two. The DASH could be flown up to 22 miles from the ship. Since it was expendable, DASH used off-the-shelf industrial electronics with no back-ups. Unsurprisingly then, DASHs proved unreliable in shipboard service, with over half of the Navy’s 746 drones lost at sea and this early ASW UAS was withdrawn from service between 1968–1973.
The UK is already procuring a British version of the General Atomics Aeronautical Systems’ (GA-ASI) latest Predator variant, the MQ-9B SkyGuardian. Known by the UK as Protector, this RAF remotely piloted aircraft is the next evolution of the Reaper, delivers more endurance and will be armed with Brimstone and Paveway IV precision weapons.
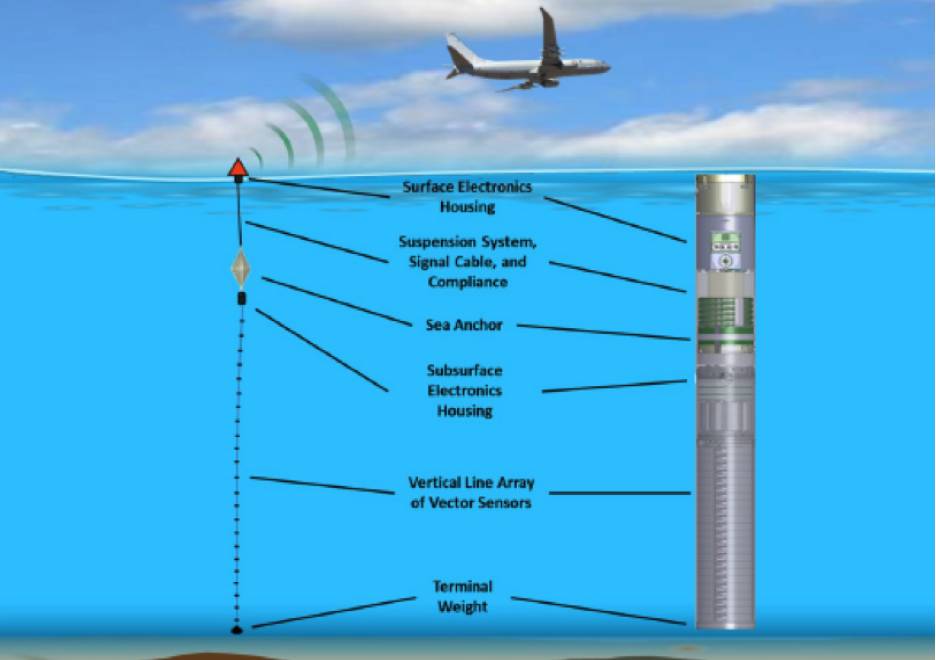 Diagram 1: MAD Operations. (Courtesy of Insider 2021). SeaLandAire Technologies
Diagram 1: MAD Operations. (Courtesy of Insider 2021). SeaLandAire Technologies
GA-ASI has also developed the SeaGuardian (maritime role) derivative of the MQ-9B with a range of 6,000nm and impressive endurance (non-role specific, the SkyGuardian is said to be capable of 40+ hrs). It has nine hard-points for a sensor or weapon payload of up to 2,100kg. Readers may recall that GA-ASI flew a prototype of the MQ-9B from North Dakota to Fairford in July 2018. This same UAS is being brought to the UK in the SeaGuardian role for trials in mid-August. In addition to the MQ-9B usual EO/IR and Lynx high resolution synthetic aperture radar, it will be fitted with a 360º maritime radar, Leonardo SAGE ESM, a sonobuoy control and monitoring system, AIS, Detect and Avoid (DAA) and Link 16. While not arriving in the UK with GS-ASI’s Sonobuoy Dispenser System (SDS), it would be capable of carrying this in the future, run by a dedicated sonobuoy management and control system.
Based at RAF Waddington initially and then RAF Lossiemouth for Exercise Joint Warrior, GAASI is planning a programme of demos for various stakeholders. In particular valuable engagement is anticipated with the CAA on airspace integration utilising DAA.
For Joint Warrior, working with the Royal Navy (RN), both GA-ASI and the RN will be investigating how the MQ-9B capability can be fully utilised in this role and what part it could play in future concept of operations (CONOPS). With Link 16 and AIS – thus good network connectivity, there is an ability to share sensor suite information, including sonobuoy tracks. The RN will be looking closely at how this useful maritime offering provides advantages working alongside and sharing sensor data with the Poseidon P-8 or Merlin Mk2.
Sonobuoys
Sonobuoys deploy on and below the surface of the ocean and, once an acoustic return signal or ‘ping’ is detected by an undersea transducer, data is then sent up to the hydrophone buoy floating on the surface. This then transmits crucial information back up to a command and control aircraft using a VHF antenna.
Modern sonobuoy employment concepts not only involve a smaller form factor and wider distribution but multi-static or multi-directional pinging which seeks to gather or pool incoming signals from a number of otherwise separated or disaggregated sonar nodes.
The hydrophone is constantly transmitting through a VHF frequency to an airplane or helicopter where the data gets processed. Multi-static means many receivers feed into a central hub.
 Elbit Hermes 900 UAV in its maritime patrol role. Elbit Systems
Elbit Hermes 900 UAV in its maritime patrol role. Elbit Systems
Other fixed wing variants
The obvious maritime purpose is now fixed in the mind of UAS designers and producers and there are many more UAS being modified for these types of roles. As the Brazilian defence news publication – defesanet – reported late last year, Israel Aerospace Industries (IAI) has added two new payloads to the Heron UAS – SDS and Magnetic Anomaly Detector (MAD). This combination enables simultaneous detection and tracking of submarines in shallow and deep waters. After dropping its payload, the Heron loiters over the area to receive and process the acoustic signals picked by the sonobuoys, providing an acoustic situational picture, enhanced by magnetic, radar, SIGINT and visual sensor indications and tracks.
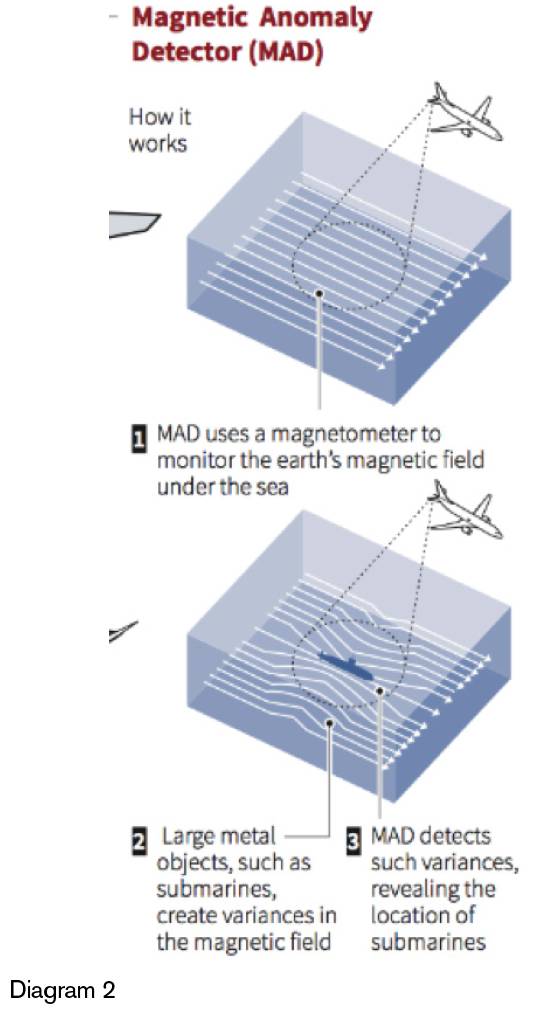 For any readers who are not very familiar with ASW, a MAD instrument detects minute variations in the Earth’s magnetic field. A submerged submarine represents a mass of ferromagnetic material that creates a detectable disturbance in the Earth’s magnetic field (see Diagram 2).
For any readers who are not very familiar with ASW, a MAD instrument detects minute variations in the Earth’s magnetic field. A submerged submarine represents a mass of ferromagnetic material that creates a detectable disturbance in the Earth’s magnetic field (see Diagram 2).
Other UAS airframes, such as the US Navy’s MQ-4 Triton, can already provide supporting roles with piloted ASW assets. Methods of detecting sub surface threats are limited however, to recognition of emitted signals or radar returns from exposed periscopes or submarines on the surface (unlikely any real threat setting).
Israel’s Elbit Systems has similarly developed a maritime patrol supporting mission suite for the Hermes 900 UAV, including synthetic aperture radar (SAR) and electronic surveillance systems. The Hermes 900 can carry 300kg of mission equipment, including up to 250kg of internal stores in its 2.5m long payload bay. One could see how this payload capacity could easily be adopted for a more comprehensive ASW role. With a typical small size sonobuoy weighing just 5.6kg, the Hermes 900 could carry enough of these to provide significant passive detection.
Smaller tactical fixed wing UAS, such as ScanEagle, are deployed for mainly ISR roles providing situational awareness of the maritime picture. As with Triton, current tactical fixed wing UAS have limited ASW role capabilities. However, changing sensor payloads (to MAD, for example) could see systems such as these providing invaluable service, reducing required flight hours from MPA and ASW helicopters.
Rotary wing ASW UAS
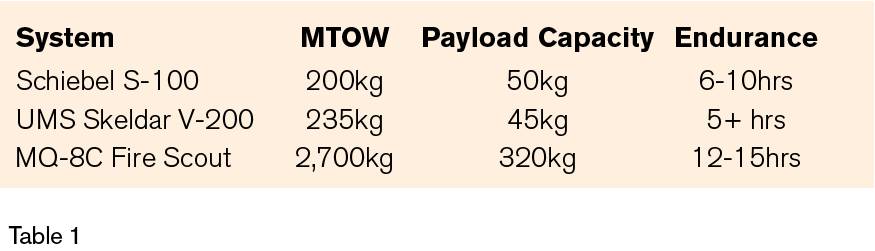
One major limiting factor for navies looking to operate the MQ-9B, or other similar fixed wing ASW role UAVs, would be the fact that these types presently operate from land. Therefore the Royal Navy is also considering the acquisition of a rotary wing UAS for ASW purposes – project name PROTEUS. A number of nations are exploring organic-at-sea military UAS capability for ASW, three of which are covered in the Table 1 above right.
 Schiebel S-100. Schiebel
Schiebel S-100. Schiebel
The S-100 Camcopter platform, as currently operated by the Royal Australian Navy (RAN), is equipped with the L3Harris Wescam’s MX-10 EO/ IR. To boost the UAS maritime surveillance capability, Schiebel has integrated Overwatch Imaging’s PT-8 Oceanwatch wide-area maritime surveillance payload which is designed to detect small or distant objects. According to the latter, the PT-8 system employs a purpose-built multi-camera gimbal with onboard artificial intelligence (AI) software that automatically detects and tracks objects of interest.
Switzerland’s UMS Skeldar is also looking to leverage on its recent experience with the Canadian Armed Forces and the German Navy with its V-200B VTOL UAV to secure its first customer in the Asia-Pacific.
For the maritime role, UMS Skeldar has integrated Sentient Systems’ Visual Detection and Ranging (ViDAR) payload, which is a persistent wide-area maritime sensor that automatically detects objects on the ocean surface and provides the operator with detailed imagery and location co-ordinates of surface objects. According to Sentient Systems, the ViDAR offers a 20nm (37km) wide search swath, equating to over 13,360Nm² of cover in 12hr at a speed of 60kt (111km/h).
While these relatively small rotary wing UAS can offer a dedicated and persistent contribution to the ASW picture, none of these offer a comprehensive ASW search capability and do not offer integrated subsurface surveillance – cue the imposing Fire Scout.
MQ-8C Fire Scout
In a US Navy-sanctioned internal research and development test in late October, Northrop slung a launcher on an MQ-8C Fire Scout filled with miniature sonobuoys made by the UK’s Ultra. These buoys were Ultra’s SSQ-955 High Instantaneous Dynamic range Analysis and Recording (HIDAR) sonobuoys, a relatively small-sized system measuring just under 42cm and weighing 5.6kg, designed for high noise environments and rated for sea-state five operation and sea-state seven survival.
The endurance of the MQ-8C can extend the anti-submarine warfare bubble around a surface ship beyond what a crewed helicopter could normally provide, particularly given competing tasking. A dedicated ASW role MQ-8C would be allowed to fly farther from a ship, over the current crop of MH-60R Sea Hawk ASWs currently employed by the US Navy in the ASW role (carrying 25 sonobuoys apiece). The MQ-8C could carry around 40 of these sonobuoys and commence screening and surveillance at a range of 100 miles from ‘mother’, allowing for precious time to react to potential hostiles and launching the ‘at readiness’ manned platform to investigate and prosecute. Consequently, the attraction of unmanned assets such as these is their persistent presence due to increased endurance. A presence that could be permanent if operated in ‘chainsaw’ manner with more than one asset. The Merlin/ EH101 in the ASW role is said to be capable of time on station of approximately 200 minutes at a radius of 100 miles on a passive sonobuoy mission. The Fire Scout offers time on station of four or five times this duration and no doubt offers significant costs savings.
 Artist’s rendition of. Northrop Grumman MQ-8C Fire Scout with sonobuoys pods. Northrop Grumman
Artist’s rendition of. Northrop Grumman MQ-8C Fire Scout with sonobuoys pods. Northrop Grumman
Summary
Gathering enough information to imply the location of a submarine is difficult enough for even the most experienced ‘skimmer’. Precisely defining that location is then also very difficult – a position known as the ‘datum’. Arriving at the datum to commence a search is critical for the submarine hunter. Late arrival makes the probability of detection very low. It takes time to get to the datum and then time to execute a dipping search. Longer dipping time gives the submarine more time to run away, making the next dip further away from the datum and thus less effective. Several factors may affect dipping time, including the gear used, crew proficiency, and uncertainty regarding the submarine’s depth.
A submarine will always be on the lookout for an indication of counter detection. Warships must slow from transit speeds to deploy helicopters, and a good submariner will notice these things. If a warship already has a loitering ASW UAS asset, the submarine has potentially lost one method of assessing suspected detection and is already having to be a particularly cautious. Add a weapon to the UAS and now you really can keep your submarine pay!