GENERAL AVIATION Transonic gliders
A need for speed
In January, US model glider enthusiast Spencer Lisenby flew a radio-controlled model glider at an unofficial record-breaking speed of 548mph (835kph) using the principle of dynamic soaring. BILL READ FRAeS reports on how it was done.
 The quote below on the right came from model glider enthusiast Spencer Lisenby in a lecture presented at TNG Technology Day in 2017. However, the sort of model gliding that Lisenby himself indulges in is of a very different nature. On 19 January Lisenby flew a model glider at what is believed to be a world record-breaking speed of 548mph. The radio-controlled glider had no engine to assist its flight and achieved the record using the principle of dynamic soaring.
The quote below on the right came from model glider enthusiast Spencer Lisenby in a lecture presented at TNG Technology Day in 2017. However, the sort of model gliding that Lisenby himself indulges in is of a very different nature. On 19 January Lisenby flew a model glider at what is believed to be a world record-breaking speed of 548mph. The radio-controlled glider had no engine to assist its flight and achieved the record using the principle of dynamic soaring.
Dynamic soaring
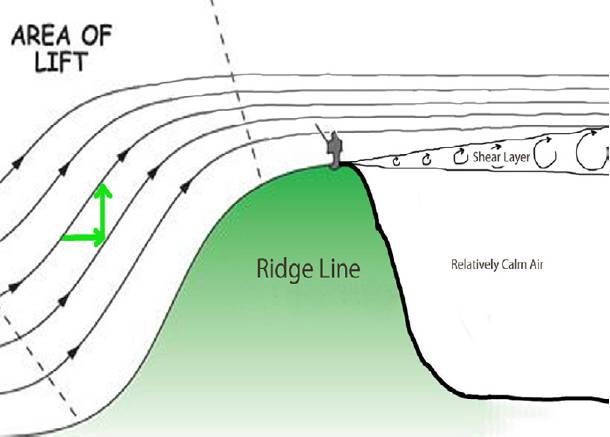
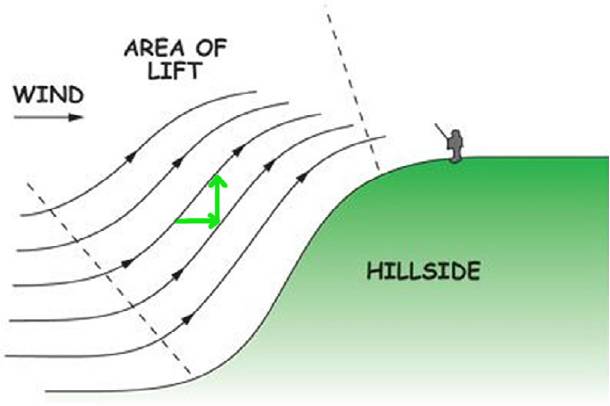
Dynamic soaring is enabled by the way wind behaves when it flows over a hillside. As sideways moving air encounters the slope of the hill, it is deflected upwards, creating a vertical component of lift which can be used by gliders – model or otherwise – for slope soaring. However, Lisenby explained that this activity has always been confined to the front side of the ridge. The other side of a ridge has always had a reputation for dangerous winds which can destroy model aircraft if they stray into it. On this side there is no vertical component to the air, so gliders will fall down and be caught in the turbulent shear layer which could cause the aircraft to crash.
WHEN PEOPLE THINK OF RADIO CONTROLLED GLIDERS, MOST OF THEM PICTURE A LIGHTWEIGHT, QUITE FRAGILE, STRUCTURE WHICH IS INTENDED TO FLOAT ABOUT GENTLY ON THERMAL ACTIVITY IN THE AIR. IT’S A VERY RELAXING ACTIVITY AND IS SOMETHING YOU DO ON A SUNDAY AFTERNOON AT THE PARK.
Spencer Lisenby
TNG Technology Day, 2017
The potential of using winds from the other side of a slope was first explored in the 1990s by engineer, dynamicist and RC glider enthusiast Joe Wurts. Wurts was flying a foam glider at Parker Mountain in California when it accidentally flew into the lee of the hill, lost control and dived. However, Wurts was able to regain control of the aircraft and fly it back to the other side of the hill. When the aircraft returned, Wurts noticed that it was flying much faster than would be expected and realised that the glider was being affected by dynamic soaring.
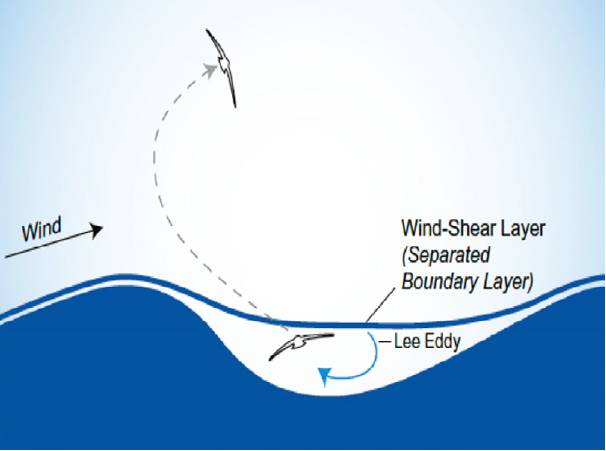
The principle of dynamic soaring is realised by flying an RC glider on the opposite side of a slope from the wind. When the aircraft is flying higher than the top of the slope, it is accelerated by the tailwind.
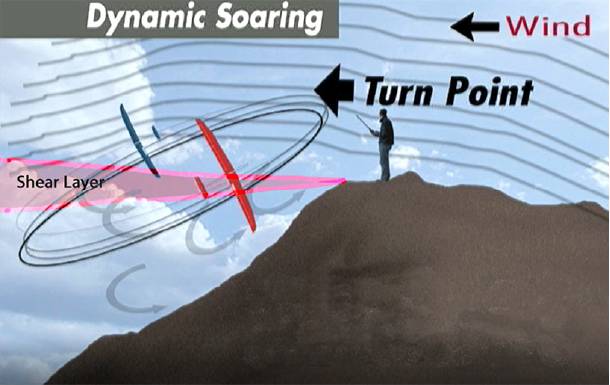
If the glider is now flown down through the shear layer into the calmer air beneath and then reverses direction, it now has enough velocity to ascend again in the wind when it can perform another 180º turn to accelerate even faster and the cycle begins again. If there was no wind resistance on the aircraft, the aircraft would continue to accelerate infinitely but its maximum speed is constrained by its drag.
 Spencer Lisenby“When explaining dynamic soaring, it gets messy because you have two frames of reference: the air and the ground,” explains Lisenby. “If you stick with the air, you can imagine two nice distinct jumps in airspeed as it crosses the shear layer each time. First, as it leaves the calm air and enters the headwind and, second as it leaves the tailwind and enters the still air. Drag constantly works to decrease the airspeed between these two spikes. The ground speed increases only between the two shear crossings while the plane does the 180º top turn. This is due to the net aerodynamic force vector being tilted forward from the wind on the plane’s belly.”
Spencer Lisenby“When explaining dynamic soaring, it gets messy because you have two frames of reference: the air and the ground,” explains Lisenby. “If you stick with the air, you can imagine two nice distinct jumps in airspeed as it crosses the shear layer each time. First, as it leaves the calm air and enters the headwind and, second as it leaves the tailwind and enters the still air. Drag constantly works to decrease the airspeed between these two spikes. The ground speed increases only between the two shear crossings while the plane does the 180º top turn. This is due to the net aerodynamic force vector being tilted forward from the wind on the plane’s belly.”
It was at this point that Lisenby became interested in the possibilities of dynamic soaring and began to make his own model gliders specially adapted and designed for speed. The first was the 60in wingspan Kinetic T-tail which reached a speed of 250mph. Lisenby then looked at ways to makes the gliders go even faster. The issue of wing failures was solved by simply adding more carbon. “People hadn’t done it because there was a whole concept that gliders had to be lightweight,” said Lisenby.
The issue of flutter was tackled by adding locked-out flap servos. Lisenby explained: “Servo motors which operate the control surfaces are embedded in the wing and they inherently have gear lash. If you were to grab a control surface and try to flex it in the same way that the air would do when flying, then you notice that the servo arm rotates due to gear lash. This creates elasticity which allows flutter to come in at a much lower speed than it should. We found that if you orient the servo arm exactly in line with the push rod linkage, you can eliminate gear lash entirely. The risk of flutter from bearing slop was also reduced by adding a third bearing support to the servos.”
“We also found that there were benefits to adding span-loading to the wings. Traditionally, people added ballast inside the fuselages. “But that would have the effect of making it worse and increase the bending loads on the wing. However, if we put the weight out in the wing tip, it has two benefits – it opposes the bending moment and also increases the roll inertia of the glider. Gliders in dynamic soaring conditions are always being rolled around and adding this point mass stabilises the plane and enables gliders to move more easily through turbulent air.”
The model glider was also fitted with a T-tail – a design feature that many model glider enthusiasts avoid because of the additional structure and weight to support it. However, Lisenby considers that in dynamic soaring the extra weight is not a problem and the T-tail has the advantage of being less affected by wing wake and also being less prone to damage when the aircraft returns to the ground.
“I should point out that I’m not the only one who was solving these problems along the way,” adds Lisenby. “RCGroups.com has been an amazing community forum where everyone shares the same goal of flying faster. Here we had access to input from a wide assortment of brilliant engineers, machinists, pilots, composites experts and even a prominent MIT professor (Mark Drela). The speeds achieved with dynamic soaring are really the result of countless enthusiasts all pushing in the same direction.”
How fast was that?
The speed of the gliders in the air was measured using handheld radar guns from observers on the ground. “Radar is now the standard measurement,” explained Lisenby. “We can’t measure the speed from sensors in the glider, as indicated airspeed has to be corrected for temperature which is difficult for pilots to know. Using commercial GPS is also not practical, as it loses its lock-on satellites at around 4G. LIDAR (light detection and ranging) remote sensing systems are also not practical, as they are hard to aim at a fast-moving model glider which has a low radar signature due to its size and is built from carbon fibre. Radar has the advantage that it doesn’t depend on the wind speed, it’s anchored to the ground and it’s easy for everyone across the world to compare their speeds with each other.”
THE SPEED ACHIEVED BY THE UNPOWERED GLIDER, WHICH WAS NOT FAR SHORT OF THE 561MPH CRUISE SPEED OF A BOEING 787 DREAMLINER, MAY ACTUALLY HAVE BEEN EVEN HIGHER, IF AIR SPEED IS TAKEN INTO ACCOUNT
However, there was an initial problem with finding manufacturers who made radar guns that could go over 310mph. “I eventually managed to persuade radar gun company Kustoms Signals to make me a radar gun that could go up to 575mph. They even called it the Falcon DS after dynamic soaring. Not long after that, Applied Concepts made the Stalker Pro II which can go up to 850mph.”
Lisenby continued to develop new model glider designs that would fly even faster. His next glider was the 100in wingspan Kinetic DP which he worked on with Dirk Pflug in Germany who helped develop a new laminar aerofoil. This glider set 11 new world records from 309mph up to 498mph. “The wing measured 2.5m which made it difficult to transport, so it was made up of three pieces which were joined together,” explained Lisenby. “In the world of model gliders, bigger is almost always better. They’re easier to see when flying and are much more stable in turbulence. However, larger aircraft do have the downside in that they have more structural problems and they are more expensive. We also have a problem in that a thicker wing, which is stronger and in which you can fit the servos, causes more drag than a thinner wing. You have to have trade-offs.”
 The 60in Kinetic model glider which reached a speed of 250mph.
The 60in Kinetic model glider which reached a speed of 250mph.
The next stage was to make a glider with an even wider wingspan which Lisenby achieved by replacing the 40in centre panel of the 100in Kinetic with a 70in one to extend the wingspan to 130in. The increased aspect ratio of the new 130in Kinetic DP proved to be 10-15% faster than the 100in Kinetic DP and the new glider managed a top speed of 513mph.
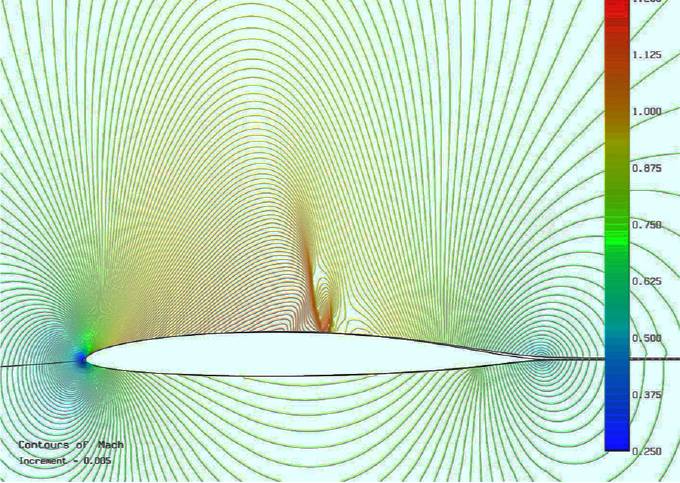 Transonic complications with supersonic airflow with vehicle Mach = 0.73 and local Mach of 1.25, equivalent to over 900mph. Mark Drela
Transonic complications with supersonic airflow with vehicle Mach = 0.73 and local Mach of 1.25, equivalent to over 900mph. Mark Drela
Using his newfound knowledge gained from these aircraft, Lisenby decided to go back to something smaller which was more affordable and made the 2m Kinetic DP. With an aspect ratio of 17:1 designed for higher lift coefficients and fitted with Dirk Pflug’s laminar flow aerofoils, this aircraft achieved the 2m wingspan record of 462mph. “It’s a really fun plane to fly,” enthused Lisenby. “A pilot who is really aggressive on the sticks and likes to pull a lot of elevator is well rewarded with spectacular performance. We measured 120g of acceleration on this aircraft which was as high as the sensors would go. This is way above the maximum G-force that human pilots can achieve, which is around 8g.”
As each aircraft got faster, the rules governing the aerodynamics began to change. “We’re now flying in a different realm than what we’re used to,” Lisenby observed. “We’re now well into the transonic realm where the compressibility of air becomes a factor. At these speeds you can get air travelling at over 900mph over the surface of the wing. As a result, you start to get a laminar shock wave forming over the upper surface of the wing, as the supersonic air has to decelerate very rapidly to match the air at the bottom of the wing. This shock wave ruins the performance of the wing. We also noticed a sharp decline in maximum lift coefficient.”
Lisenby experimented with a swept wing design to delay the transonic issues. However, this design did not behave as well in the air. He then developed another design, the Transonic DP, which has a one-piece ‘skinny wing’ spanning 3.3m wide with an aspect ratio of 22.5:1. “The wing has to be in one piece to maintain its structural integrity,” he said. “It is very long which makes it difficult to transport but I can just about fit it into my pickup with the wing going in next to me in the driver’s seat.” The Transonic glider wing was fitted with special aerofoils – which were developed with assistance from Dirk Pflug, Mark Drela and Thomas Pils.
 Swept wing glider design under test. Above: 130in Kinetic – 513mph. Spencer Lisenby Swept wing glider design under test. Above: 130in Kinetic – 513mph. Spencer Lisenby |
 Craters on Mars – ideal for dynamic soaring. ESA Craters on Mars – ideal for dynamic soaring. ESA
|
Towards transonic speeds
Using this aircraft, Lisenby succeeded in achieving higher and higher speed records. In April 2017, he set a new world speed record of 519mph. On 19 January 2021, this record was broken again with an incredible speed of 548 mph from the top of Parker Mountain near Los Angeles where the ‘Santa Ana’ winds were blowing at 65mph. The unofficial record speed was measured using a radar gun held by fellow model glider enthusiastic Bruce Tebo, who was the first to break the 500mph barrier.
 130in Kinetic – 513mph. Spencer Lisenby
130in Kinetic – 513mph. Spencer Lisenby
The speed achieved by the unpowered glider, which was not far short of the 561mph cruise speed of a Boeing 787 Dreamliner, may actually have been even higher, if air speed is taken into account. “I think we actually peaked around Mach 0.82 just as we crossed the shear layer into the headwind,” remarked Lisenby. “With a ground speed measured by radar of 548mph and adding a 65mph headwind gives a total airspeed of 613mph.”
“It’s not just a question of developing an aircraft design, the glider operator also needs to develop skills to cope with such high speeds,” remarks Lisenby. “The faster you go, the faster you have to think. The minimum orbit time of the glider is only two seconds, which means that, in 0.45 sec, it travels over 100 metres (328ft).”
Looking forward to the future, Lisenby is aiming to push the Transonic DS glider even faster to speeds up to 580mph. He also thinks that there is potential to develop dynamic soaring designs for solar-powered autonomous UAVs which could fly at low altitudes over oceans harnessed by the albatross or using the high-altitude Jetstream 100mph (161kph) air currents at 30,000 feet. “I’ve heard that it’s really windy on Mars,” he quipped. “There’s also plenty of craters which means that you could always find a wind direction to take advantage of dynamic soaring winds.”